1.H3ロケット打ち上げ犯騒曲
2024年2月17日、国産ロケットH3-2号機が打ち上げに成功した。1年前の打ち上げ中止から数えて3度目にしての成功である。例によって、マスコミお得意の手のひら返しで、「激しさを増す宇宙ビジネスをめぐる国際競争で今後の日本の宇宙開発を担う“切り札”に」(NHK)、「再挑戦実るH3ロケット2号機打ち上げ成功、宇宙開発利用の新エースに」(サイェンスポータル)等々、絶賛の嵐である。
しかしながら、蜀犬としては、喜び4割心配6割というところだろうか。
思えば2号機の打ち上げ成功から1年ほど遡った2023年2月17日、H3ロケット1号機の発射直前のことである。機体と地上設備の通信・電源ラインを切り離された瞬間、電気信号の乱れたことで、第1段目の機体制御コントローラが誤動作を起こし、安全装置作動により打ち上げが中止された。成功か失敗かでしか評価できない某マスコミ記者が記者会見で「失敗では?」と質問したことで、SNS上で「打ち上げ中止」か「打ち上げ失敗」かという論争が巻き起こった。
さて、旅客機が離陸する場合、乗客は徐々に加速してから一気に離陸しているように思うが、実際にはパイロットは機体を離陸させるまでの間、速度計を見ながらさまざまな判断を行っている。具体的には、離陸時の速度にはV1、VR、V2といった数値が設定されている。
まず、『V1』=『離陸決心速度』であるが、これは多発(=複数のエンジンを装備)旅客機が離陸中にひとつのエンジンにトラブルが発生した時、旅客機の速度がV1以下であれば、パイロットはただちに離陸を中止、ブレーキをかけて機体を停止させる。 V1以下の速度では機体が浮き上がっていないため、滑走路をオーバーランせずに安全に停止することができるのである。仮にV1を越えた後にエンジントラブルが発生した場合、パイロットは残ったエンジンで最大推力を発揮させ、何か何でも機体を離陸させる必要がある。なぜなら、V1以上の速度で機体を停止させた場合、確実に滑走路をオーバーランするからである。最悪の場合、旅客機は滑走路のフェンスを突き破り、外の施設に突っ込んで大破炎上、ということになりかねない。
次に『VR』=『機首引き起こし速度』である。速度がVRに達するとパイロットは操縦悍を操作して機首を引き起こす。つまり、この時点で初めて車輪が滑走路を離れて離陸体勢に移るわけである。
その後、さらに速度が上がりV2=安全離陸速度に達すると、機長は機体が安定して上昇できるように、つまりV2以下にならないようにスロットルを調整する。
このように一連の手順には根拠となるべき数値が決められているのである。
この考え方をロケットの打ち上げに置き換えると、H3ロケットが打ち上げ直前に異常を検知して停止しだのは、V1以下だったので停止させたというのと同じである。ロケットが無傷なら再整備して異常部分を修理し、搭載した人工衛星をまた打ち上げればよいからである。仮に異常を検知しながら打ち上げを継続して、最悪の場合、ロケットが地上で爆発でもすれば、搭載している人工衛星も含めてその費用は全て回収不能となる。
従って、このような場合、やはり、『打ち上げ失敗』ではなく、『打ち上げ中止』というのが最も適切な表現だろう。
最も、発射直前にロケットと地上設備の通信・電源ラインを切り離すというのは、1944年にロンドン攻撃に使われた世界初の弾道ミサイルV-2の発射以来、ごく普通に行われている方式である。そのような部分で電気信号が乱れるというのは、システム設計の考え方とそれをどう保証したのかという問題が残るのだが・・・・。
2.信号系統と電源系統
さて、それから、18日後の2023年3月07日、再整備を終えたH3ロケット1号機は再び打ち上げられることになった。
開発の課題だった第一段のLE-9エンジンは正常に作動し、H3-1号機は発射台を離れた。H3-1号機はその後も順調に飛行を続け、第1段/第2段分離までは正常に行われた。
しかし、第2段エンジンヘの点火がうまくいかず、その後ミッションを達成する見込みがないと地上コントロールが判断した結果、指令破壊信号によりH3-1号ロケットは自爆に至った。先の旅客機の離陸の例で言えば、V2(=離陸後、安定して上昇飛行を維持できる速度)到達後に突然、全エンジンが停止して墜落するようなものである。さすがにこれは『打ち上げ失敗』と評するしかない。
この件については、2023年4月27日JAXA H3ロケット試験機1号機打上げ失敗原因調査状況」を読み解くと、

出典:2023年4月27日JAXA H3ロケット試験機1号機打上げ失敗原因調査状況」より】
② 順調に飛行を続け、第一段と第二段の分離にも成功
③ 2段機体制御コントローラ(V-CON2A/2B)が第1段と第2段の分離を検知
④ 2段機体制御コントローラA(V-CON2A)が2段推進系コントローラA(PSC2A)へ第2段エンジンの着火信号(SEIG)を出力
⑤ 同時に2段機体制御コントローラB(V-CON2B)が2段推進系コントローラB(PSC2B)へ2段エンジンの着火信号(SEIG)を出力
⑥ 2段推進系コントローラPSC2AとPSC2Bのどちらかが着火信号(SEIG)を出力すると、それを受けたエンジンコントロールボックス(ESC)に駆動を指示
⑦ ニューマチックパッケージ(PNP)はエンジンコントロールボックス(ESC)の指示に基づき、各エンジンバルブおよび点火器のエキサイタスパークプラグを駆動
⑧ 第2段ロケットエンジンを点火するエキサイタスパークプラグの異常をエンジンコントロールボックス(PNP)が検知
⑨ エンジンコントロールボックス(PNP)の異常信号を受けて2段機体制御コントローラA、B(V-CON2A/2B)がそれぞれ電源を遮断
⑩ 2段エンジン失火によりロケットは惰性で飛行
⑥ 地上からの破壊指令信号により燃料タンクを破壊、四散したロケットの残骸は海へ落下。
となっている。
H3ロケットの第2段ロケットエンジンはH-IIAから引き継いだもので、40回以上もロケットエンジンを作動させた(おそらく本番の打ち上げ以外に地上試験を含むものと思われる)が、着火失敗は一度も起きなかった、そうである。
では、なぜ、高い信頼性を待ったH-IIAロケットエンジンが今回に限ってエンジン点火に失敗してしまったのだろうか。
『H3ロケット試験機1号機打上げ失敗の原因究明に係る調査・安全小委員会報告書『令和5年10月26日』を読むと・・・・。
HIIAロケットの2段目のエンジンの点火は、
1.制御誘導計算機(GCC2)が着火信号(SEIG)を2段エンジンコントロールボックス(ECB)に指令。
2.2段エンジン・コントロール・ボックス(ECB)は、ニューマチックパッケージ(PNP)に作動を指令。
3.ニューマティック・パッケージ(PNP)はロケットエンジンのバルブ駆動用ヘリウムガスを供給、エキサイタスパークプラグ(点火器)の駆動を制御。
4.エンジン燃焼器内部に液体酸素、液体水素が噴射され、エキサイタスパークプラグの点火により、ロケットエンジンが燃焼を開始。
という手順で実行されるようである。
ここで注意すべき点は、電源系である。蜀犬は現役時代、メカトロ開発のメカ屋をしていたが、電装系のトラブルについて、トロ屋にいろいろ教えてもらったことがある。


例えば、バッテリーからの電力供給線を接続する場合、回路基板上にプラス系、マイナス系を設置し、制御/駆動回路に夫々並列に接続するのではなく、駆動回路と制御回路をそれぞれ独立した回路基板に分離したうえで、別々に電力線を接続しなければならないというのもあった。これは、モータ作動時に発生するノイズが電力線を介して制御回路に流入し、制御不能になることへの回避策である。通常は、ダイオードやコンデンサでノイズを防止するというのが電教科書的な知識であるが、スイッチのオンオフの際には突入電流といって通常時の数倍の電流が流れたり、逆流した逆転電流が流れることがあり、教科書的な対応では防止できない事態が発生するためである。
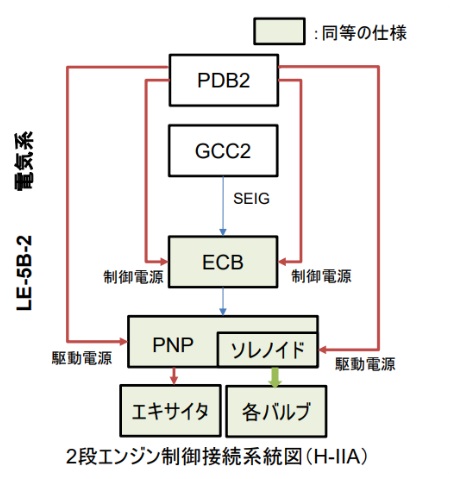
実際にHIIAの第2段システム図を見ると、電源系統は、電力分配器(PDB2)により、制御系の電源と駆動系とに分離されている。従って、バルブの駆動やエキサイタスパークプラグの点火で発生するノイズが駆動電源ラインを流れても、電力分配器(PDB2)でカットされるので、2段エンジンコントロールボックス(ECB)へ駆動系のノイズの影響はない。
それに対してH3では、着火信号が出るところまではHIIAもH3も同じだが、電源系統を見ると、H3の第2段ロケットエンジンでは、制御電源と駆動電源が2段推進系コントローラ(PSC2)で分岐している。具体的な回路の中身までは判らないが、仮に、ニューマティック・パッケージ(PNP)やその下流のエキサイタ、各ノリレブ作動でノイズが発生すると、ノイズ電流は2段推進系コントローラ(PSC2)を通じて2段エンジンコントロールボックス(ECB)に流れ込む可能性があるのではないだろうか。
つまり、ロケットエンジンの機械部分ではなく制御系を含めた第2段ロケットエンジンのシステムとして考えた場合、H- II A とH-3はまったくの別物だったと言える。
報告書によると、H3の2段ロケットのトラブルの直接原因は、2段推進系コントローラ(PSC2)の下流にある機器に渦電流が発生し、それをPSC2が異常と判断した結果、ロケットエンジンの点火を中止したとなっている。その渦電流はいったいどこから発生したのだろうか?
少なくとも根本対策として、HIIAのように電源系統と信号系統を完全に分離しておけば、第2段のトラブルは起きなかったかもしれない。
その2へ続く
参考文献
『H3ロケット試験機1号機打上げ失敗の原因究明に係る調査・安全小委員会報告書『令和5年10月26日』